





BH8-282
Disponible bajo pedido
38.000,00 €
SKU:
RB-H-BARRETT-BH282
| Peso | 20,000000 kg |
|---|---|
| Dimensiones | 31,000000 × 52,000000 × 26,000000 cm |
| Fabricante |
Barrett Technology, Llc |
| Nº Modelo |
BH8-282 |
| Peso |
0,98 kg |
| Capacidad de carga |
6 kg |
| Resolución del codificador del motor |
4096 conteos |
| Tipo de motor |
Eléctrico sin escobillas |
| Comunicación |
CAN / RS-232 / Adaptadores USB proporcionados |
| Velocidad de dedos |
Dedo completamente abierto a cerrado: 1 s / 180 grados: 0,5 s |
| Tamaño |
204 x 90 x 54 mm |
| Protocolo de comunicación |
CAN, RS-232 |
| Interfaz |
Interfaz Gráfica de Usuario (GUI) |
| Voltaje |
20 – 80 VDC |
| Tiempo de agarre |
0,5 – 1,0 s |
| Nº de dedos |
3 (1 fijo, 2 rotables) |
| Ejes de la mano |
8 |
G1
Disponible bajo pedido
43.540,00 €
SKU:
RB-UNITREE-G1
| Peso | 0,000000 kg |
|---|---|
| Dimensiones | 0,000000 × 0,000000 × 0,000000 cm |
| Nº Modelo |
G1 |
| Fabricante |
Unitree |
| Dimensiones (plegado) |
690 x 450 x 300 mm |
| Dimensiones (desplegado) |
1.270 x 450 x 200 mm |
| Altura |
1.320 mm |
| Peso |
~35 kg |
| Velocidad |
2 m/s |
| Procesador |
8-core high-performance CPU |
| Autonomía |
2 h |
| Batería |
9000mAh |
| Cámara frontal |
Intel RealSense D435 |
| LIDAR |
LIVOX-MID360 |
| Capacidad de carga |
2 kg |
| Micrófonos |
Si |
| GDL |
G1: 23 GDL |
H1
Disponible bajo pedido
SKU:
RB-UNITREE-H1
| Peso | 50 kg |
|---|---|
| Dimensiones | 172 × 57 × 22 cm |
| Nº Modelo |
H1 |
| Fabricante |
Unitree |
| Tamaño |
(1520+285)mm × 570mm × 220mm |
| Peso |
Aprox. 47 kg |
| Ancho del cuerpo |
570 m |
| Grosor del cuerpo |
220 m |
| Altura del cuerpo |
1560 mm |
| Altura de la cabeza |
200 m |
| Longitud del brazo |
338 mm |
| Longitud del antebrazo |
338 mm |
| Longitud de la pantorrilla |
400 mm |
| Longitud del muslo |
400 mm |
| Altura total |
1760 m |
| Procesador |
Intel Core i5 (Platform Function) ,Intel Core i7(User Development) |
| Batería |
15 Ah (0,0864 KWh) |
| Voltaje |
Voltaje máximo 67.2V |
| Cámara frontal |
Cámara de profundidad de campo |
| Tipo de LÁSER |
LIDAR 3D |
| Ultimate torque of joint unit |
Knee: 360 N. m / Hip: 220 N. m / Ankle: 45 N. m / Arm: 75 N. m |
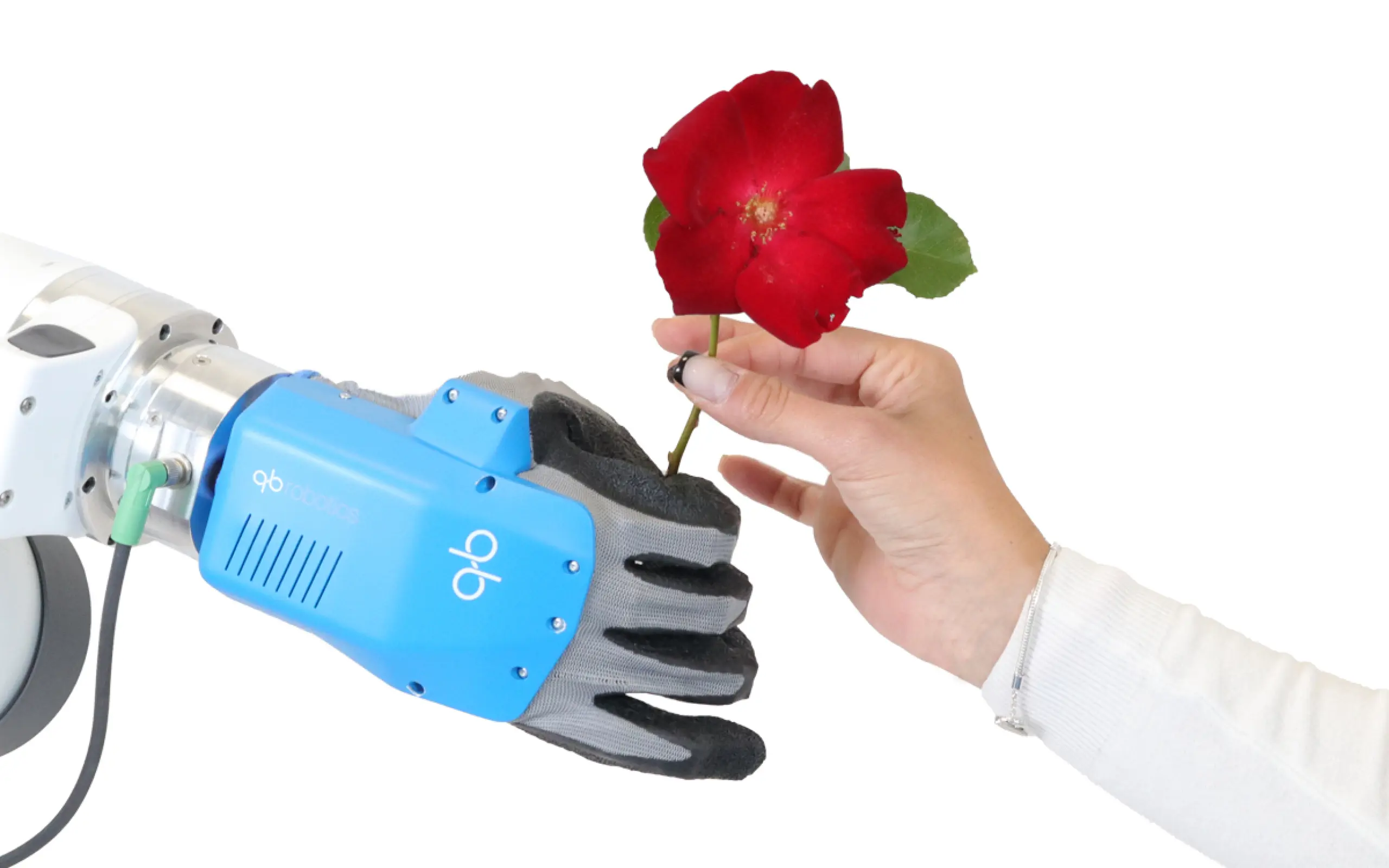
qb SoftHand Industry
Disponible bajo pedido
7.500,00 €
SKU:
RB-H-QB-SI
| Peso | 20,000000 kg |
|---|---|
| Dimensiones | 45,000000 × 53,000000 × 43,000000 cm |
| Fabricante |
qb Robotics |
| Nº Modelo |
qb SoftHand Industry |
| Protocolo de comunicación |
EtherCAT, UDP |
| Tamaño |
185 mm x 117,5 mm x 83,2 mm |
| Temperatura |
-20 ºC a 50 ºC |
| Peso |
0,99 kg |
| Voltaje |
12 – 50 V |
| Protección |
IP65 |
| Capacidad de carga |
Carga útil de agarre: 2 kg |
| Consumo de potencia |
3 – 15 W |
| Fuerza de agarre máximo |
62 N |
qb SoftHand Research
Disponible bajo pedido
9.000,00 €
SKU:
RB-H-QB-SR
| Peso | 20,000000 kg |
|---|---|
| Dimensiones | 45,000000 × 53,000000 × 43,000000 cm |
| Fabricante |
qb Robotics |
| Nº Modelo |
qb SoftHand Research |
| Interfaz |
USB & RS485 |
| Protocolo de comunicación |
RS485 |
| Temperatura |
-20 ºC a 50 ºC |
| Tamaño |
216 x 191 x 56 mm (configuración abierta) |
| Peso |
0,77 kg |
| Voltaje |
23,1 – 24,8 V |
| Capacidad de carga |
1,1 kg |
| Consumo de potencia |
1,4 – 30 W |
| Tiempo de agarre |
De un puño completamente abierto a un puño cerrado en 1,1 s |
| Fuerza de agarre máximo |
62 N |
RB-THERON+
Disponible bajo pedido
SKU:
RB-MM-ROBOTNIK-RB-THERON-PLUS
| Peso | 200 kg |
|---|---|
| Nº Modelo |
RB-THERON+ |
| Fabricante |
Robotnik Automation |
| Tamaño |
1.072 x 552 x 655 mm |
| Velocidad |
1,25 m/s |
| Autonomía |
Hasta 6 h |
| Capacidad de carga |
Brazo: 5 kg ,Plataforma: 100 kg |
| Entorno |
Interiores |
| Protección |
IP30 |
| Motores de tracción |
2 x 250 con freno |
| Cinemática |
Accionamiento diferencial |
| Sistema de localización | |
| Temperatura |
0ºC – 40ºC |
| Pendiente máxima |
6% |
| Comunicación |
Bluetooth 4.0 ,WiFi 802.11 b/g/n/ac |
| Conectividad |
Ethernet x2 ,HDMI x1 ,Salida de potencia ,USB x3 |
| Peso |
Brazo: 25 kg ,Plataforma: 160 kg |
ROSbot 3
Disponible bajo pedido
2.900,00 €
SKU:
ROSbot 3
| Peso | 15 kg |
|---|---|
| Dimensiones | 45 × 38 × 44 cm |
| Nº Modelo |
ROSbot 3 |
| Fabricante |
HUSARION |
| Tamaño |
Con cámara y LiDAR: 200 x 233 x 197 mm ,Sin cámara ni LiDAR: 200 x 233 x 103 mm ,Sin cámara: 200 x 233 x 141 mm |
| Peso |
Con cámara y LiDAR: 2,84 kg ,Sin cámara ni LiDAR: 2,45 kg |
| Velocidad |
1 m/s |
| Capacidad de carga |
Hasta 5 kg (no en trabajo continuo) |
| Batería |
1,5 – 5 h. |
SVH Hand
Disponible bajo pedido
SKU:
RB-H-SCHUNK-SVH
| Peso | 20,000000 kg |
|---|---|
| Dimensiones | 45,000000 × 53,000000 × 43,000000 cm |
| Fabricante |
Schunk |
| Nº Modelo |
SVH HAND |
| Interfaz |
RS-485 |
| Peso |
1,3 kg |
| Voltaje |
24 V |
| Longitud |
242 mm |
| Anchura |
92 mm |
| Proporción con una mano humana |
1:1 |
| Número de ejes |
20 |
| Movimientos dedo Meñique |
1 |
| Movimientos dedo Anular |
1 |
| Movimientos dedo Corazón |
2 |
| Movimientos dedo Índice |
2 |
| Movimientos dedo Pulgar |
2 |
| Movimientos de estensión |
1 |
UST-20LX
Disponible bajo pedido
2.280,00 €
SKU:
EL-SE-L-UST-20LX
| Peso | 0,500000 kg |
|---|---|
| Dimensiones | 10,000000 × 12,000000 × 8,000000 cm |
| Fabricante |
Hokuyo Automatic |
| Nº Modelo |
UST-20LX |
| Precisión |
+-40 mm |
| Interfaz |
Ethernet |
| Luminosidad |
15.000 Lux |
| Temperatura |
-10ºC a +50ºC |
| Peso |
130 g |
| Voltaje |
10-30 V |
| Resolución angular |
0,25° |
| Rango |
270º |
| Protección |
IP65 |
| Entorno |
Interiores |
| Distancia |
0,06 – 20 m |
| Frecuencia de escaneo |
40 Hz |