







RB-SUMMIT
Mobile robot perfect for research environments in both indoor and outdoors.
Free course: how to master RB-SUMMIT with ROS. With the purchase of a RB-SUMMIT we will give you an annual licence in The Construct online academy.
Optional components
STANDARD VERSION
- CPU i7
- 2D Laser Tim571
- RGBD camera Intel D435f
- 4G Router (Rutx11)
- IMU VectorNav
- GPS UBlox
- Battery 15Ah@48V
- Docking station
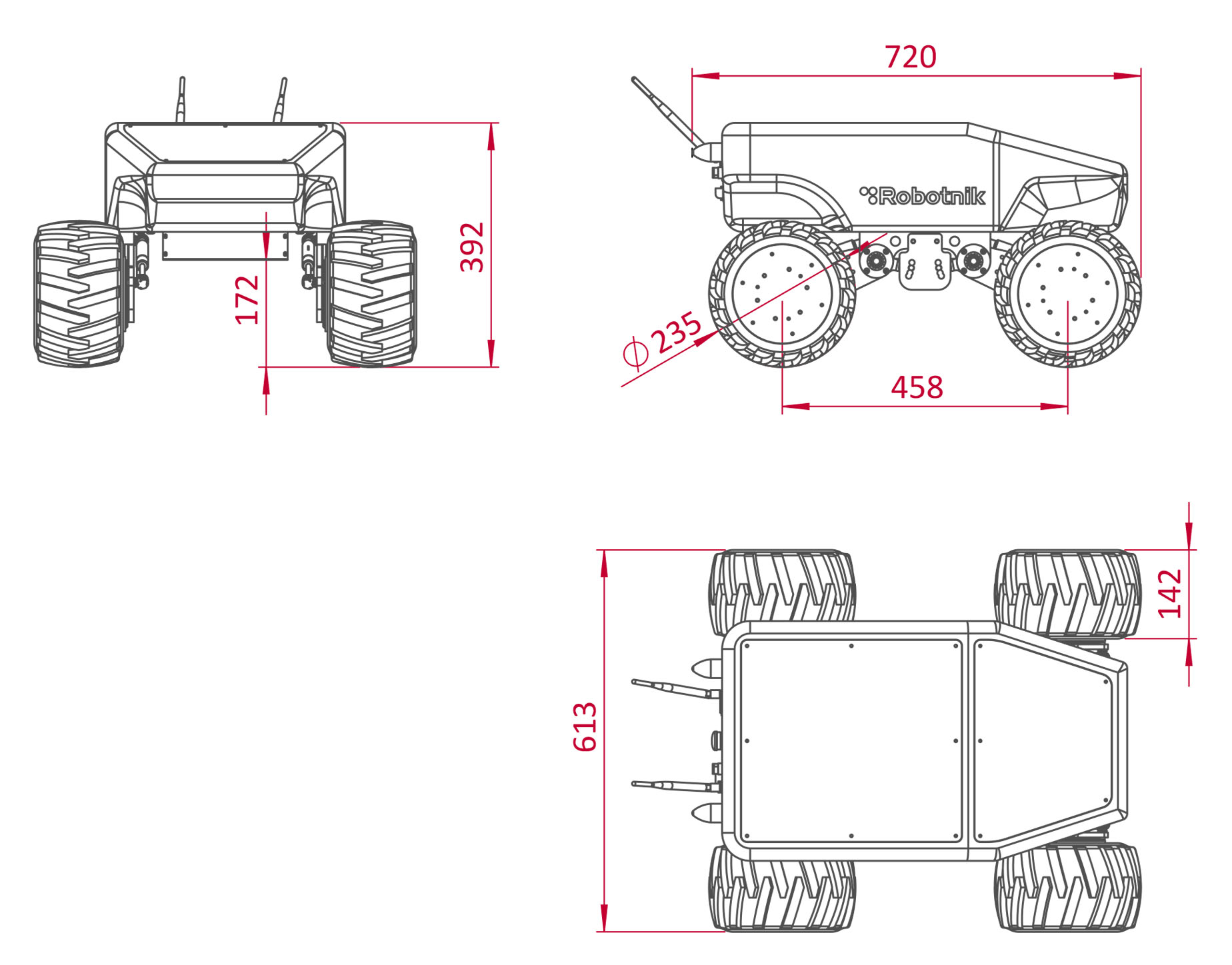
The Robotnik's RB-SUMMIT has skid-steering kinematics based on 4 high power motorwheels. Each wheel integrates a hub brushless motor with gearbox and encoder (optional).
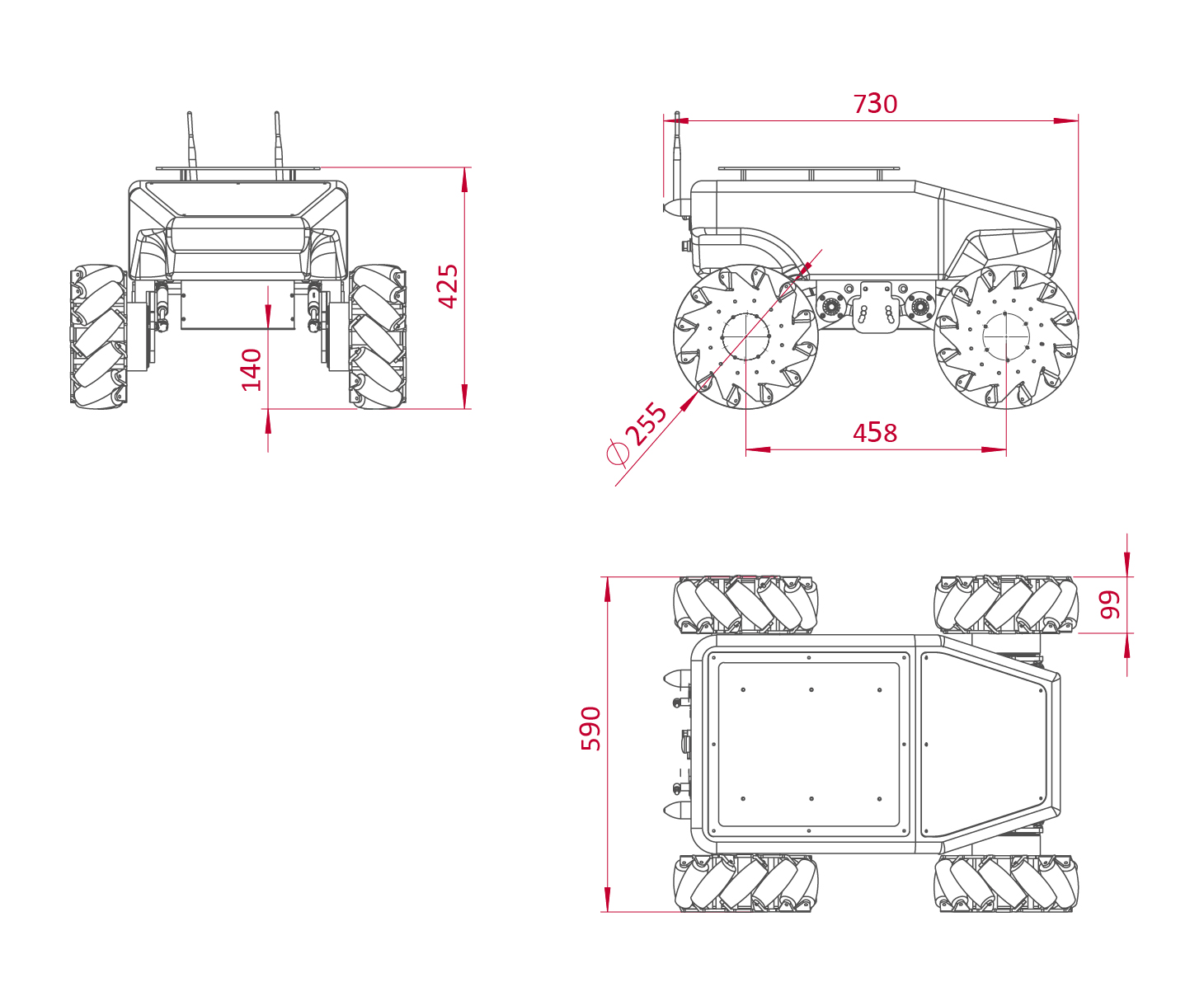
RB-SUMMIT has two possible kinematic configurations. The omnidirectional configuration mounts mecanum wheels on an independent suspension system. The mecanum wheels can be easily replaced by conventional wheels (rim mount), thus allowing easy switch from the indoor omnidirectional configuration to the versatile skid-steering configuration, both indoors and outdoors.
The odometry is computed with the use of the four encoders and a high precision angular sensor mounted inside the chassis.
The strong mechanical structure allows to carry high loads. There are several suspension shocks possibilities. They can also be mounted at several positions to modify the robot clearance.
The robot base can navigate autonomously or teleoperated by means of a PTZ camera that transmits video in real time.
The common sensor options include a Hokuyo laser scanner and a range of RTK-DGPS kits. It also has internal (USB; RS232 and GPIO) and external connectivity (USB, RJ45 and power supply 12 VDC) to easily add custom components.
The control architecture is open-source and modular, based in ROS.
Size:
Applications:
- Research
- Surveillance
- Military
- Remote monitoring
- Access to hazardous areas
| Model Nº | SUMMIT-XL |
| Ambient temperature / humidity | -10°C to +45°C |
| Size | 720 x 614 x 416 mm |
| Weight | 65 Kg |
| Speed | 3 m/s |
| IP | IP53 |
| Load capacity | 65 Kg |
| Controller | Open architecture ROS | PC with Linux integrated |
| Traction system | Skid steering / omni directional (mecanum) |
| Traction motors | 4 x 500 W brushless servomotors |
| Autonomy | 10 h continuous motion |
| Max. climbing angle | 80 % |
| Battery | LiFePO4 15Ah@48V |
| Environment | Indoors/Outdoors |
| Communication | Wifi 802.11n |
| Connectivity | Internal: USB, RS232 and GPIO External: USB, RJ45,12 VDC and battery |
Official ros-package:
- http://wiki.ros.org/Robots/SummitXL
- Sources:
- https://github.com/RobotnikAutomation/summit_xl_sim
- https://github.com/RobotnikAutomation/summit_xl_common
- Supported versions: Hydro, Indigo, Kinetic







