





SUMMIT-XL STEEL
Mobile platform with an excellent mechanical steel structure that allows carrying heavy loads up to 250 kg.
Recommended configuration mounts 2 uds. of the UST-20LX laser and an Orbbec Astra
Free course: how to master SUMMIT-XL STEEL with ROS. With the purchase of a SUMMIT-XL STEEL we will give you an annual licence in The Construct online academy.
Optional components
SUMMIT-XL STEEL is a robotic platform for R&D applications designed especially for indoors. It is noted due to its robust design, which can support up to 250 kg of payload.
The mobile platform has omnidirectional kinematics based on 4 high-power mechanum drive wheels. Each wheel integrates a hub brushless motor with gearbox and encoder (optional). The odometry is computed with the use of a high precision angular sensor mounted inside the chassis and using the wheel sensor.
The mobile robot can navigate autonomously or teleoperated by means of a PTZ camera that transmits video in real time.
The common sensor options include a Hokuyo laser scanner and a range of RTK-DGPS kits. It also has internal (USB, RS232, GPIO and RJ45) and external connectivity (USB, RJ45, power supplies 5, 12 VDC and battery) to add custom components easily.
Applications:
- Research and education
- Surveillance
- Military
- Remote monitoring
- Access to hazardous areas
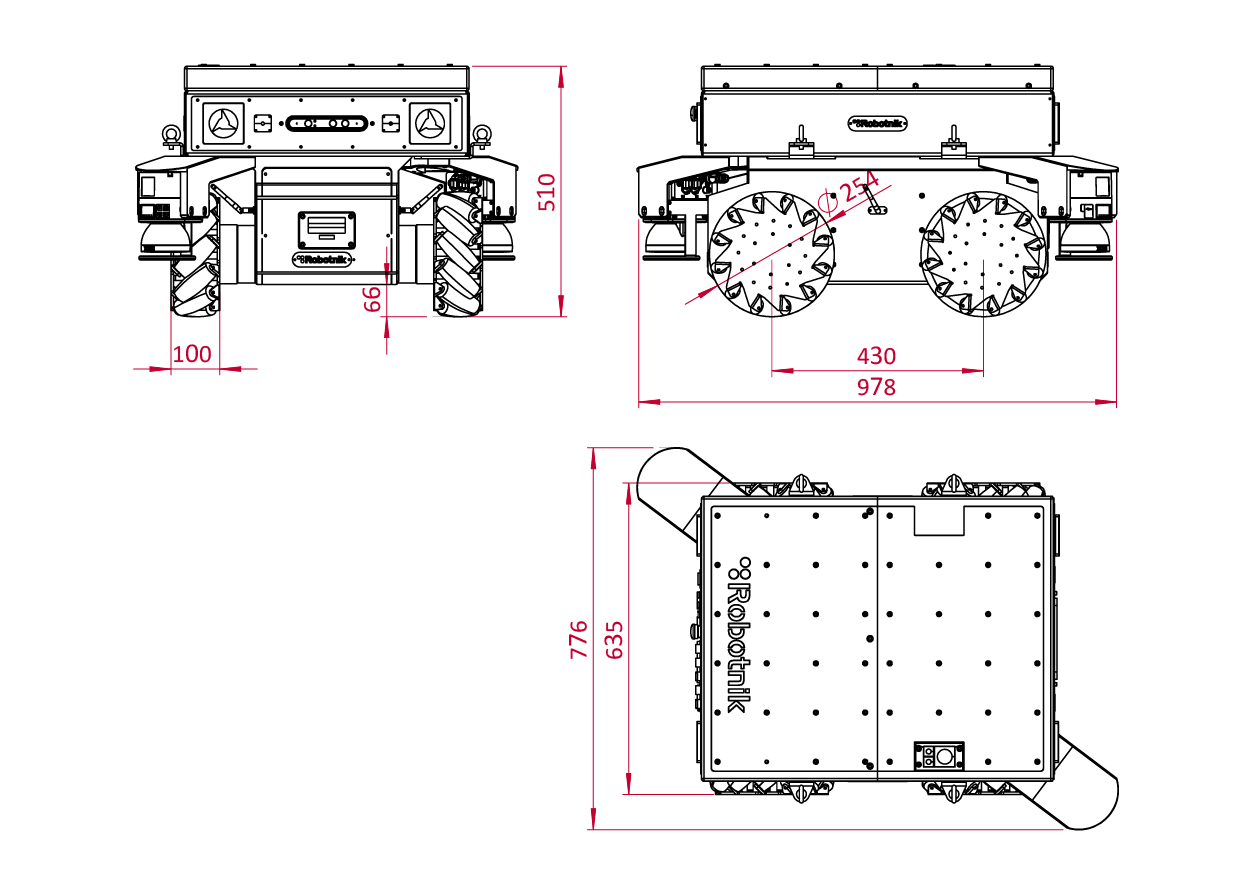
Size:
Recommended configuration:
Integration of two lasers at least for a wider range of vision.
Standard platform with two Laser HOKUYO-10LX (270º vision as shown in picture below) and two CAMERA PTZ AXIS 5013 ZOOM 3x (one in front and other at the back of the mobile platform).
Range laser vision:
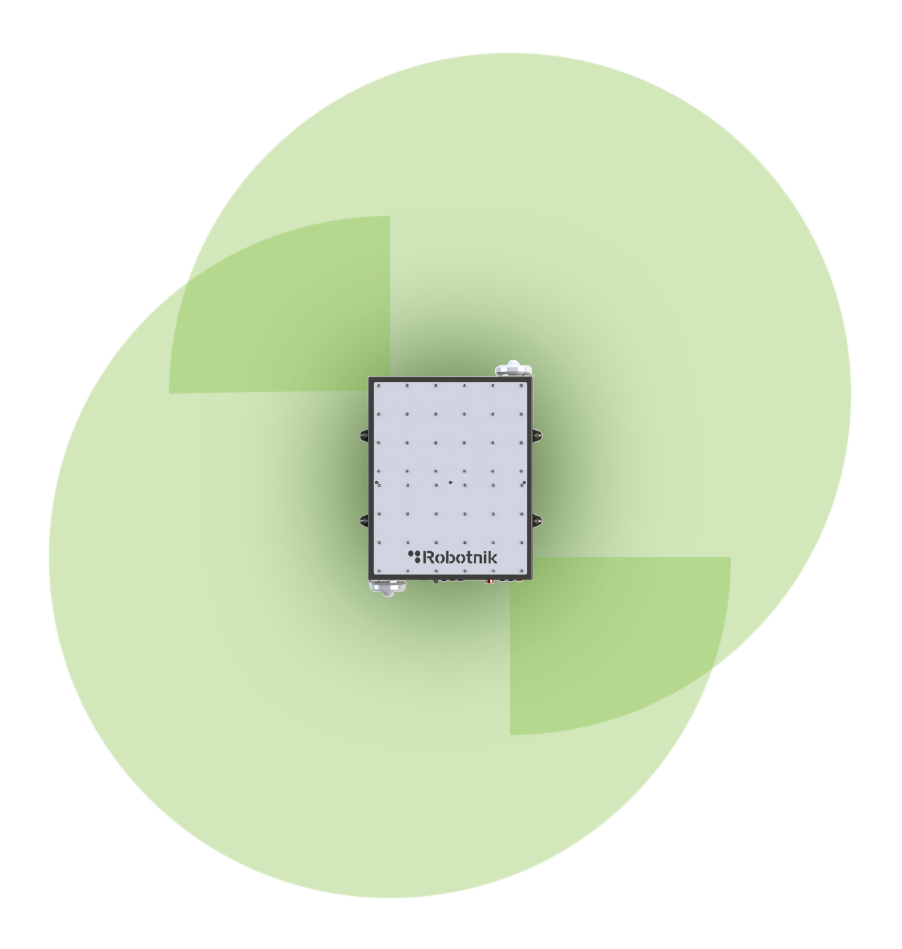
*Mobile platform can be configured as customer needs.
| Model Nº | SUMMIT-XL STEEL |
| Ambient temperature / humidity | 0º to +50ºC |
| Size | 978 x 776 x 510 mm |
| Weight | 105 Kg |
| Speed | 3 m/s |
| IP | IP52 / IP64 |
| Load capacity | 130 kg / 250 kg |
| Controller | Open architecture ROS | Integrated CPU with Linux |
| Traction motors | 4 x 500 W Brushless servomotors with safety brake |
| Autonomy | 6 / 12 h |
| Max. climbing angle | 30º |
| Baterías | LiFePO4 15Ah@48VDC |
| Environment | Indoor |
| Communication | WiFi 02.11a / b / g / n / ac Bluetooth 5.1 |
| Connectivity | Internal: USB, RS232 and GPIO; External: USB, RJ45, power supplies 5, 12 VDC, and battery |
- Official ros-package:
- summit_xl packages
- Sources: https://github.com/RobotnikAutomation/summit_xl_sim
- Sources: https://github.com/RobotnikAutomation/summit_xl_common
- Supported versions: Melodic and Kinetic










