



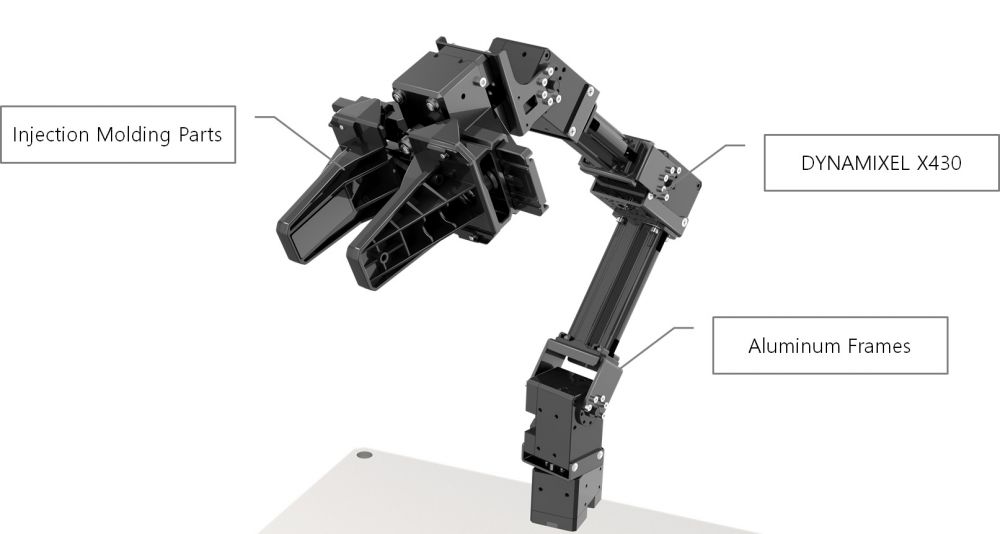
OpenManipulator-X
Manufacturer: Robotis
Open source robotic arm based on ROS
RB-ARM-ROBOTIS-RM-X52-TNM
New product
Optional components
- The OpenManipulator-X (RM-X52-TNM) robotic arm has a high payload as DYNAMIXEL XM-430 model is applied.
- Easy to use with PC or mobile platform such as TB3 Waffle Pi.
- Provides source code and development environment which helps you immediately operate it with TB3 Waffle Pi.
- You can freely select and use either PC or Controller e.g. OpenCR.
- Provides a variety of open source software as well as 3D drawings and CAD data for research and development.
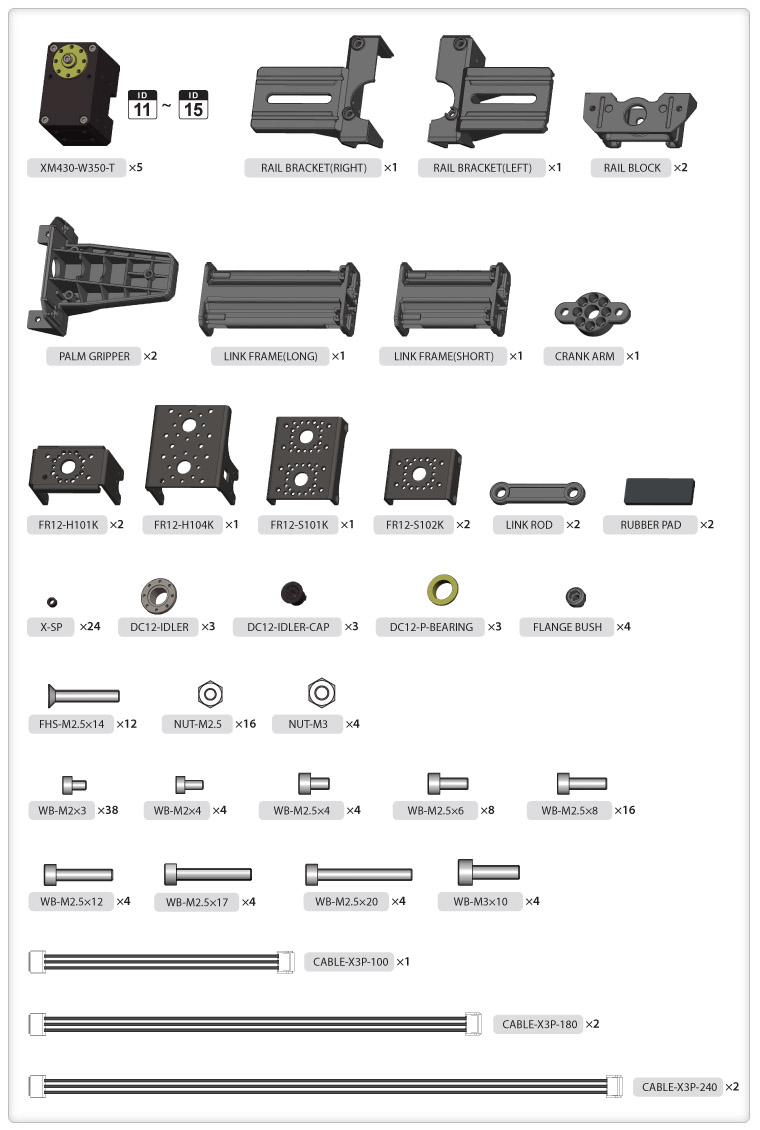
Package Components
| XM430-W350-T | 5 |
|---|---|
| Exclusive Plastic Frame Set | 1 |
| FR12-H101K | 2 |
| FR12-H104K | 1 |
| FR12-S101K | 1 |
| FR12-S102K | 2 |
| HN12-I101 Set | 3 |
| Robot Cable Set X3P (by length) | 5 |
| Bolt & Nut Set | 1 |
| Rubber Pad (Finger Tip) | 2 types x 2 |
| Phillips Screwdriver | 1 |
| Allen Wrench (by type) | 3 |
Sold Seperately
| Power Supply | SMPS 12V 5A, U2D2 Power Hub Board |
|---|---|
| Controller | OpenCR or PC |
| Interface | U2D2 |
| Frame | Pi-Camera Frame Set |
| Base | Base Plate-02 |
Package Contents
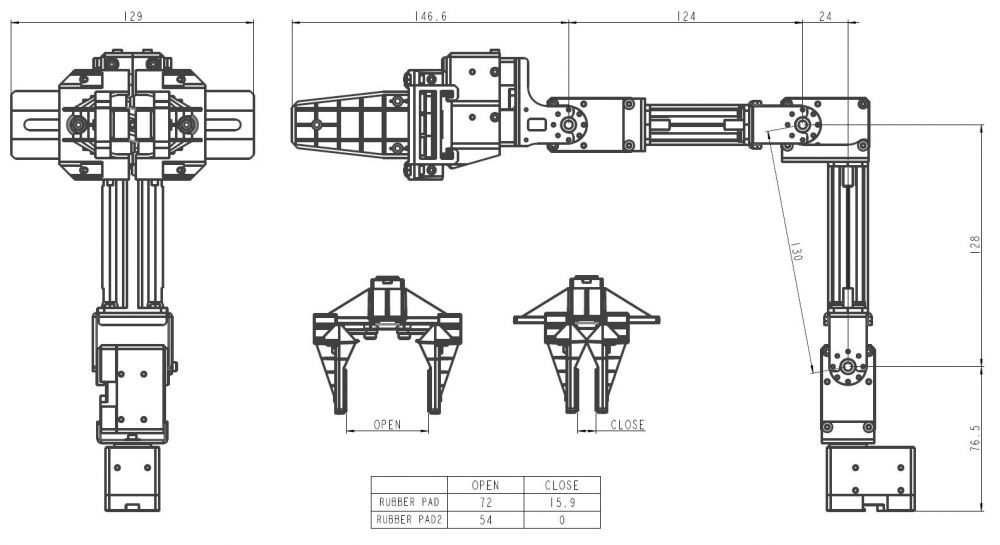
Dimension
Please Note:
* These items are NOT included:
| Power Supply | SMPS 12V 54 |
| Controller | OpenCR o PC |
| Interface | U2D2 |
| Etc. | Placa base-02 |
The arm is not assembled.
Compatible with TurtleBot 3 controller and power.
The assembly manual is not included, but you can download the PDF file on online for free.
| Model Nº | RM-X52-TNM |
| Weight | 700g |
| Speed | 46 RPM (joint) |
| Load capacity | 500g |
| Communication | TTL (Level Multidrop BUS) |
| Reach | 380mm (14.9″) |
| Power input | 12V |
| Software | ROS, Dynamixel SDK, Arduino, Processing |
| DOF | 5 (4DOF + 1DOF Gripper) |
Official ros-package:
- ROBOTIS-MANIPULATOR







