





OpenMANIPULATOR-PRO
Brazo robotizado 6GDL
Entrega aproximada: 2-3 semanas
Componentes opcionales
Plataforma modular para fácil mantenimiento y personalización.
Sin caja de control externa y alta relación peso / carga útil.
Componentes del paquete
| OpenMANIPULATOR-PRO | 1 (completamente ensamblado) |
|---|---|
| Estuche duro | 1 |
| U2D2 | 1 |
| Cables de repuesto (4P, 2P) | 1 |
| Juegos de tornillos (WB M3x8, etc.) | 1 |
| Hub de expansión 4P | 1 |
Especificación S/W
- Paquete de controlador de manipulador ROBOTIS basado en software integrado
- Biblioteca OpenMANIPULATOR-PRO ( cinemática, trayectoria y controlador Dynamixel).
- Paquete de programa GUI para configurar y monitorear parámetros de control.
- MoveIt! paquete para OpenMANIPULATOR-PROPaquete de simulación basado en Gazebo Simulator
Propósito
- Investigación y educacion
- Experimento de cinemática y dinámica
- Investiga y diseña un robot de doble brazo
- Construir un sistema de robot móvil
- Operación industrial
- Equipo de inspección
- Sistema de entrega a pequeña escala
Configuración predeterminada de fábrica
| CARNÉ DE IDENTIDAD | 1 |
|---|---|
| Velocidad de transmisión | 57600 bps |
Características de DYNAMIXEL PRO
Motor de CC de diseño modular todo en uno + controlador + controlador + sensor + engranaje de reducción cicloide
Compacto y ligero
Tamaño del módulo minimizado con equipo compacto y ligero reducción cicloide.
Alta relación peso-salida (0.05Nm / g)
Alta resistencia al impacto (más del 400%)
Alta precisión y baja reacción
Codificador absoluto sin contacto (magnético) (por AMS) y codificador incremental para un posicionamiento preciso
Baja reacción (3 ~ 4arcmin)
Datos de rendimiento proporcionados probados por el Sistema de Acreditación de Laboratorios de Corea (KOLAS)
Control de par basado en
Corriente Algoritmo de detección de corriente de alta velocidad y control de retroalimentación de corriente
Control de triple bucle para retroalimentación de corriente, velocidad y posición.
Entorno de desarrollo amigable para el usuario
Proporcione una biblioteca basada en lenguaje C
Varios ejemplos de soluciones (C ++, LabVIEW, C #, eclipse, JAVA, etc.)
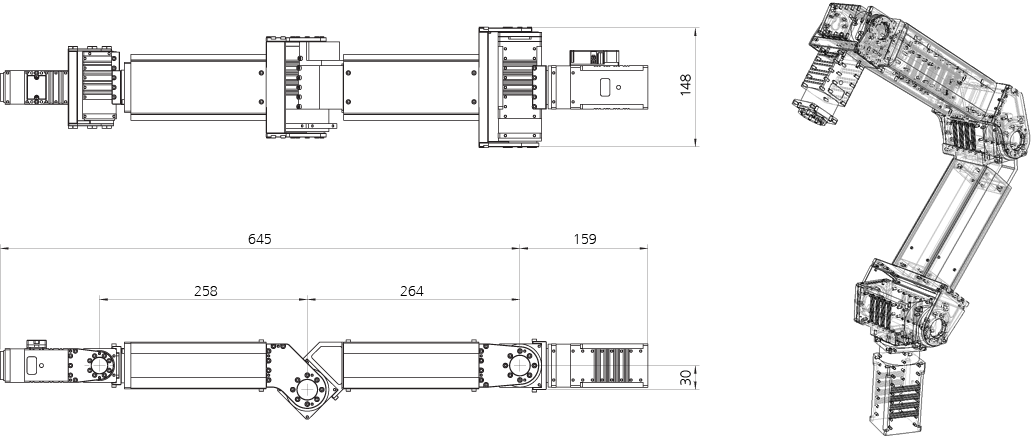
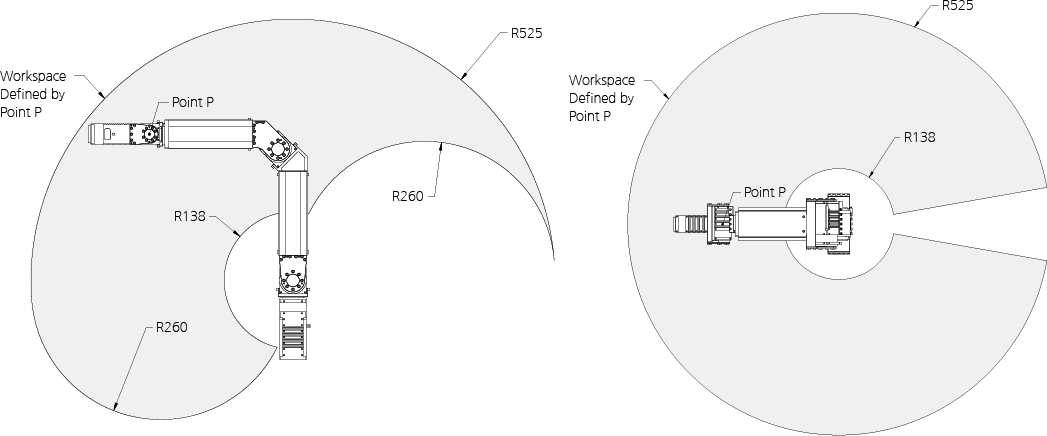
Dimensiones
Tenga en cuenta:
La fuente de alimentación y el PC no están incluidas.
| Nº Modelo | RM-P60-RNH |
| Peso | 5.5 kg |
| Velocidad | 180 (Cada articulación, grados / seg) |
| Capacidad de carga | 3 kg |
| Comunicación | RS-485 (Multi Drop Bus) |
| Alcance | 645 mm |
| Alimentación | 24 (VDC) |
| Software | ROS (Ubuntu Linux) |
Paquete oficial para ROS:
- ROBOTIS-MANIPULADOR








