




RB-1 BASE
Robot móvil diseñado para aplicaciones de logística en interiores
Con la configuración estándar lleva montado el láser UST-20LX y el sensor Orbbec Astra
Componentes opcionales
VERSIÓN ESTÁNDAR
- CPU i7
- 2D LASER Tim571
- IMU VectorNav
- Cámara RGBD Intel D435f
- Batería 30Ah@24V
- Estación de carga
El robot móvil RB-1 BASE es una platorma de tracción difencial diseñada por Robotnik para el desarrollo de aplicaciones en interiores. El robot puede transportar diferentes cargas o materiales, así como llevar integrados otros sistemas como, por ejemplo, un brazo o un torso robótico.
RB-1 BASE puede incorporar una amplia gama de láseres con distancias de operación de 5 a 30-60 metros. Además se puede hacer uso de sensores RGBD para la detección de obstáculos. En la plataforma estándar se incorpora un sensor UST-20LX y el sensor Orbbec Astra.
Concretamente, el robot es capaz de detectar obstáculos de dos maneras distintas, a través del sensor RGBD instalado y a través de un láser que es usado para la navegación y la localización. En ambos casos, el robot puede detenerse o buscar una ruta alternativa para sortear el escollo y alcanzar el siguiente punto de paso.
Opciones:
- Estación de carga
- Unidad de elevación
Aplicaciones:
- Logística (transporte autónomo)
- Monitorización remota
- Investigación y desarrollo
- Aplicaciones generales
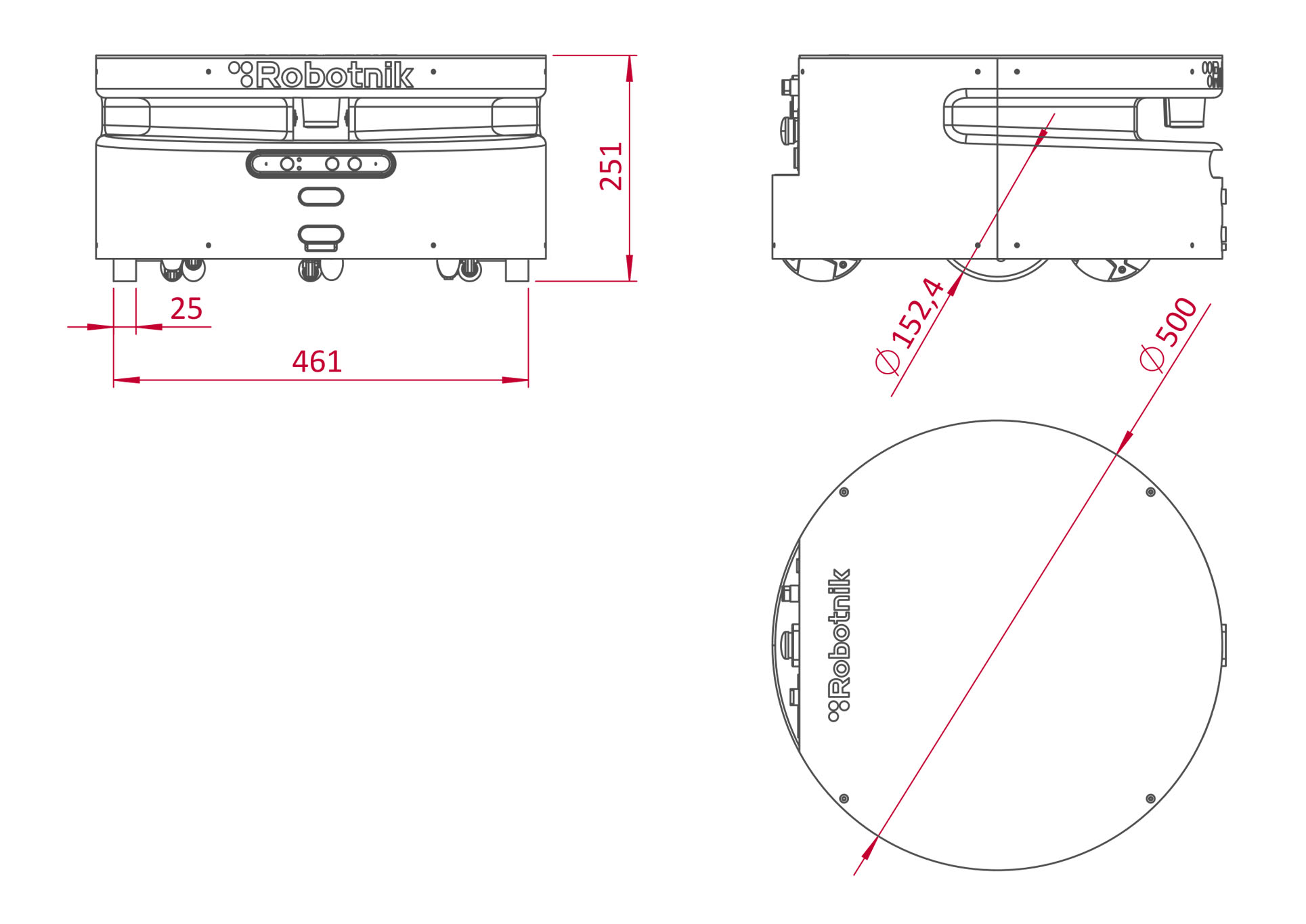
Dimensiones:
| Nº Modelo | RB-1 BASE |
| Temperatura / Humedad | 0º a +50ºC |
| Dimensiones | ø 515 x 303-338 mm (con unidad de elevación opcional) |
| Peso | 30 Kg |
| Velocidad | 1,5 m/s |
| Grado de protección IP | IP51 |
| Capacidad de carga | 50 Kg |
| Control | Industrial PC Intel i7, Arquitectura abierta basada en ROS |
| Sistema de tracción | Tracción diferencial |
| Motores de tracción | Servomotores 2 x 250 W |
| Autonomía | 6 h en aplicación industrial |
| Máxima pendiente | 8% |
| Baterías | LiFePO4 30Ah@24VDC |
| Ambiente | Interiores |
| PC | 4ª generación Intel 7 |
| RAM | 8 Gb |
| Disco duro | 120 Gb |
| Comunicación | WiFi 802.11ac, 4G |
| Conectividad | 2x USB, 2x Ethernet y 1x HDMI |
- Paquete oficial para ROS:
- http://wiki.ros.org/Robots/RB-1_BASE
- Fuentes: https://github.com/RobotnikAutomation/rb1_base_sim
- Fuentes: https://github.com/RobotnikAutomation/rb1_base_common
- Versiones soportadas: Melodic y Kinetic.










