



OpenManipulator-X
Fabricante: Robotis
Brazo robotizado de código abierto basado en ROS
RB-ARM-ROBOTIS-RM-X52-TNM
Nuevo producto
Componentes opcionales
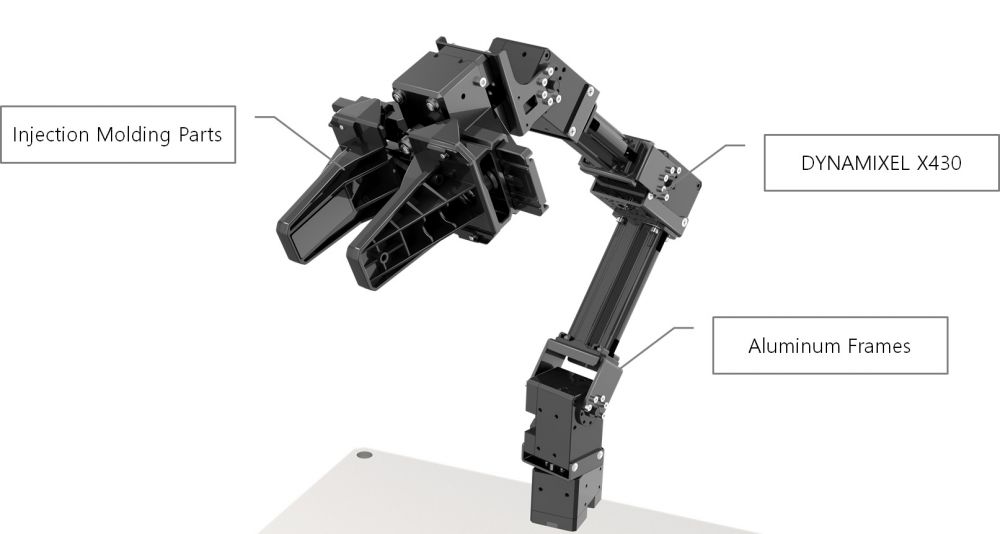
- El brazo robótico OpenManipulator-X (RM-X52-TNM) tiene una alta carga útil ya que se aplica el modelo DYNAMIXEL XM-430.
- Fácil de usar con PC o plataforma móvil como TB3 Waffle Pi.
- Proporciona código fuente y entorno de desarrollo que le ayuda a operarlo inmediatamente con TB3 Waffle Pi
- Puede seleccionar y utilizar libremente una PC o un controlador, p. Ej. OpenCR.
- Proporciona una variedad de software de código abierto, así como dibujos en 3D y datos CAD para investigación y desarrollo.
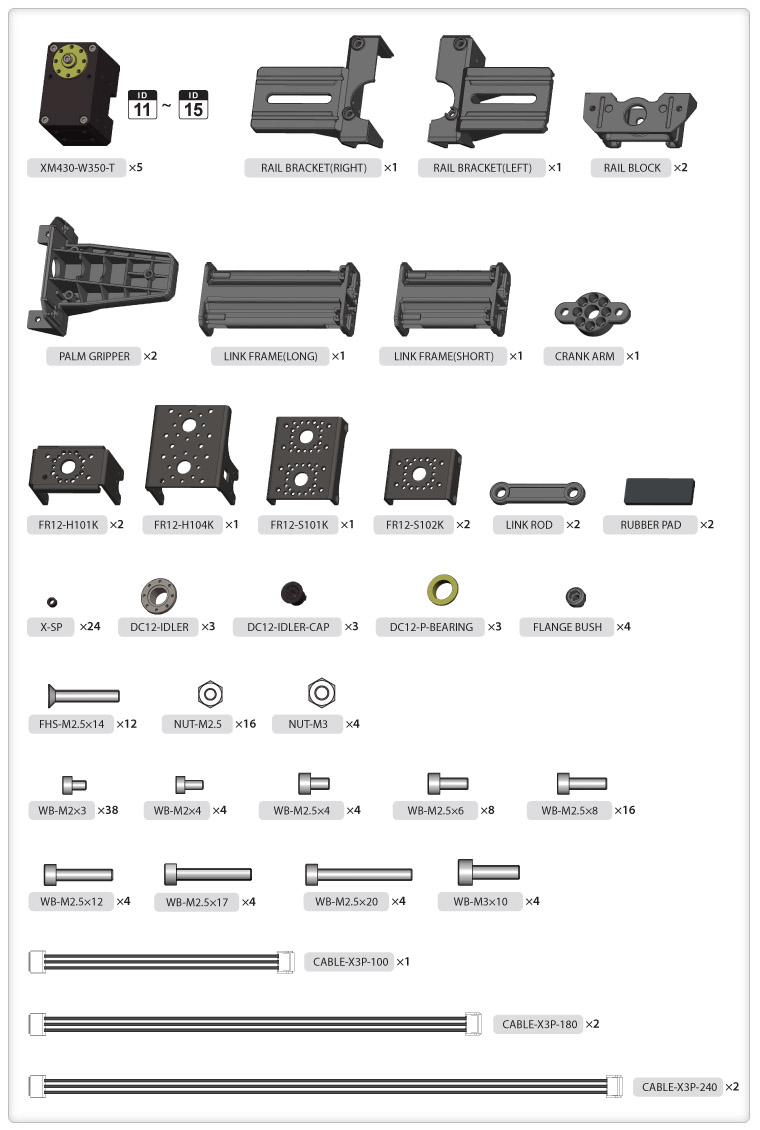
Componentes del paquete
| XM430-W350-T | 5 |
|---|---|
| Conjunto de marco de plástico exclusivo | 1 |
| FR12-H101K | 2 |
| FR12-H104K | 1 |
| FR12-S101K | 1 |
| FR12-S102K | 2 |
| HN12-I101 Set | 3 |
| Juego de cables para robot X3P (por longitud) | 5 |
| Juego de pernos y tuercas | 1 |
| Almohadilla de goma (punta de los dedos) | 2 tipos x 2 |
| Destornillador Phillips | 1 |
| Llave Allen (por tipo) | 3 |
Se vende por separado
| Fuente de alimentación | SMPS 12V 5A, U2D2 Power Hub Board |
|---|---|
| Controlador | OpenCR or PC |
| Interfaz | U2D2 |
| Cuadro | Conjunto de marco de cámara Pi |
| Base | Placa Base-02 |
Contenido del paquete
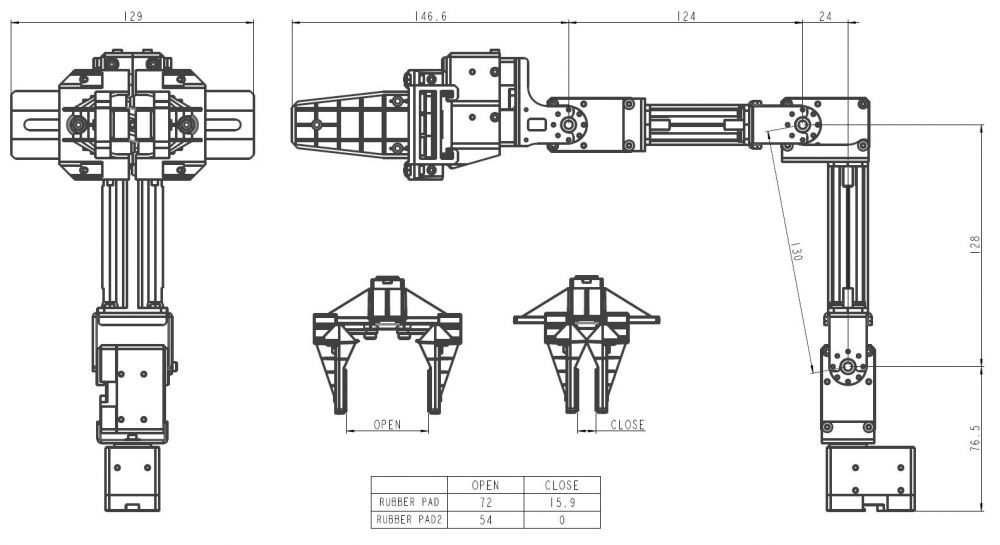
Dimensiones
Tenga en cuenta:
* Estos artículos NO están incluidos:
| Fuente de alimentación | SMPS 12V 54 |
| Controlador | OpenCR o PC |
| Interfaz | U2D2 |
| Etc. | Placa base-02 |
El brazo va sin montar.
Compatible con controlador y alimentación TB3.
El manual de montaje no está incluido, pero puede descargar el archivo PDF en línea de forma gratuita.
| Nº Modelo | RM-X52-TNM |
| Peso | 700g |
| Velocidad | 46 RPM (articulación) |
| Capacidad de carga | 500g |
| Comunicación | TTL (BUS de nivel multipunto) |
| Alcance | 380mm (14.9″) |
| Alimentación | 12V |
| Software | ROS, Dynamixel SDK, Arduino, Procesamiento |
| DOF | 5 (pinza 4DOF + 1DOF) |
Paquete oficial para ROS:
- ROBOTIS-MANIPULADOR







