





OpenMANIPULATOR-PRO
6DOF Robot Arm
Optional components
User Programmable Open-Source Manipulator System
Modular Platform for Easy Maintenance and Customization
No External Control Box & High Weight-to-Payload Ratio
Package Components
| OpenMANIPULATOR-PRO | 1 (Fully-assembled) |
|---|---|
| Hard Case | 1 |
| U2D2 | 1 |
| Spare Cables (4P, 2P) | 1 |
| Screw Sets (WB M3x8 etc) | 1 |
| 4P Expansion Hub | 1 |
S/W Specifications
- ROBOTIS Manipulator controller package based on integrated software OpenMANIPULATOR-PRO Library (Kinematics,Trajectory and Dynamixel Controller).
- GUI program package for setting and monitoring control parameters.
- MoveIt! package for OpenMANIPULATOR-PRO
- Simulation package based on Gazebo Simulator
Purpose
- Research and Education
- Kinematics and Dynamics Experiment
- Research and Design a Dual Arm Robot
- Build a Mobile Robot System
- Industrial Operation
- Inspection Equipment
- Small-Scale Delivery System
Factory Default Settings
| ID | 1 |
|---|---|
| Baud Rate | 57600 bps |
(User can change various settings including ID and baud rate according to environment)
Features of DYNAMIXEL PRO
All-in-one Modular Design
DC Motor + Controller + Driver + Sensor + Cycloid Reduction Gear
Compact and Lightweight
Minimized module size with compact and lightweight cycloid reduction gear.
High weight-to-output ratio(0.05Nm/g)
High impact resistance (over 400%)
High Precision and Low Backlash
Contactless (Magnetic) Absolute Encoder(by AMS) & Incremental Encoder for Precise Positioning
Low backlash (3~4arcmin)
Performance data provided tested by Korea Laboratory Accreditation Scheme(KOLAS)
Current-Based Torque Control
High speed current sensing algorithm and current feedback control
Triple-loop control for current, speed and position feedback.
User Friendly development environment
Provide C language based library
Various solution examples (C++, LabVIEW, C#, eclipse, JAVA, etc..)
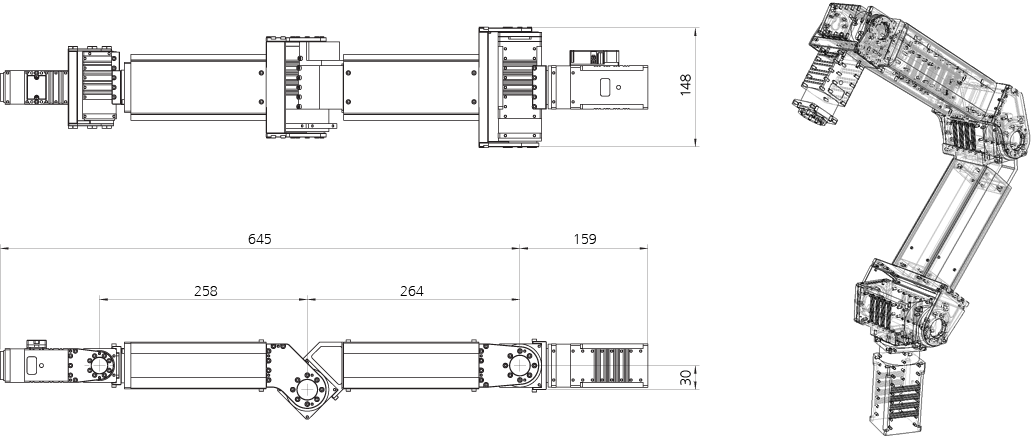
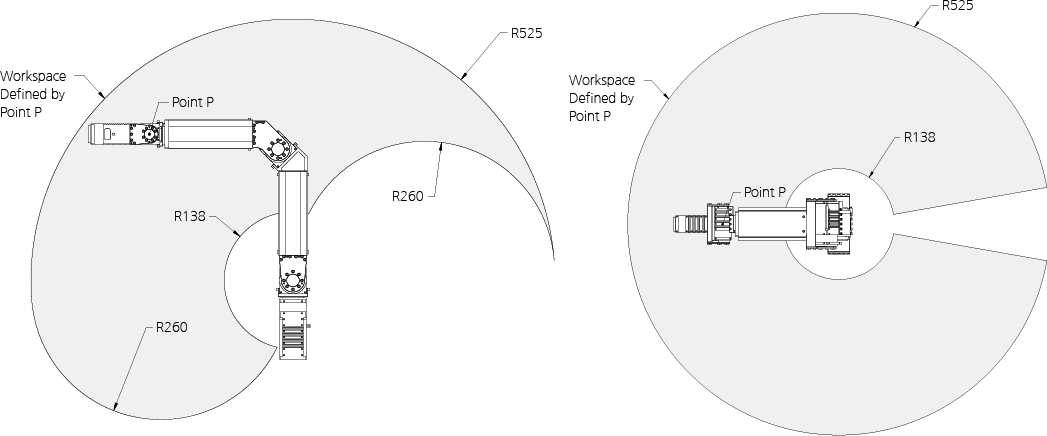
Dimension
Please Note:
Power supply and PC are not included.
| Model Nº | RM-P60-RNH |
| Weight | 5.5 kg |
| Speed | 180 (Each joint, deg/sec) |
| Load capacity | 3 kg |
| Communication | RS-485 (Multi Drop Bus) |
| Reach | 645 mm |
| Power input | 24 (VDC) |
| Software | ROS (Ubuntu Linux) |
Official ros-package:
- ROBOTIS-MANIPULATOR







