




RB-1 BASE
Mobile robot intended for logistics indoor applications
Standard configuration mounts UST-20LX sensor and Orbbec Astra sensor
Optional components
STANDARD VERSION
- CPU i7
- 2D LASER Tim571
- IMU VectorNav
- RGBD camera Intel D435f
- Battery 30Ah@24V
- Docking station
The Robotnik's mobile robot RB-1 BASE is a differential wheeled robot intended for general indoors applications. The mobile robot can carry different loads or materials and can integrate other components or platforms such as a robotic arm or a torso.
The mobile platform can integrate a wide number of range finders with operation distances from 5 to 30-60 meters and RGBD sensors for the detection of obstacles. The standard configuration mounts UST-20LX sensor and Astra sensor.
The robot is able to detect obstacles in two different ways, by RGBD sensor installed and by the laser sensor that is used for navigation and positioning. In both cases, the robot can either stop or find an alternative route to avoid the obstacle and reach the next waypoint.
Options:
- Automatic recharging station
- Lifting unit
Applications:
- Logistics (autonomous transport)
- Remote monitoring
- Research & Development
- General purposes
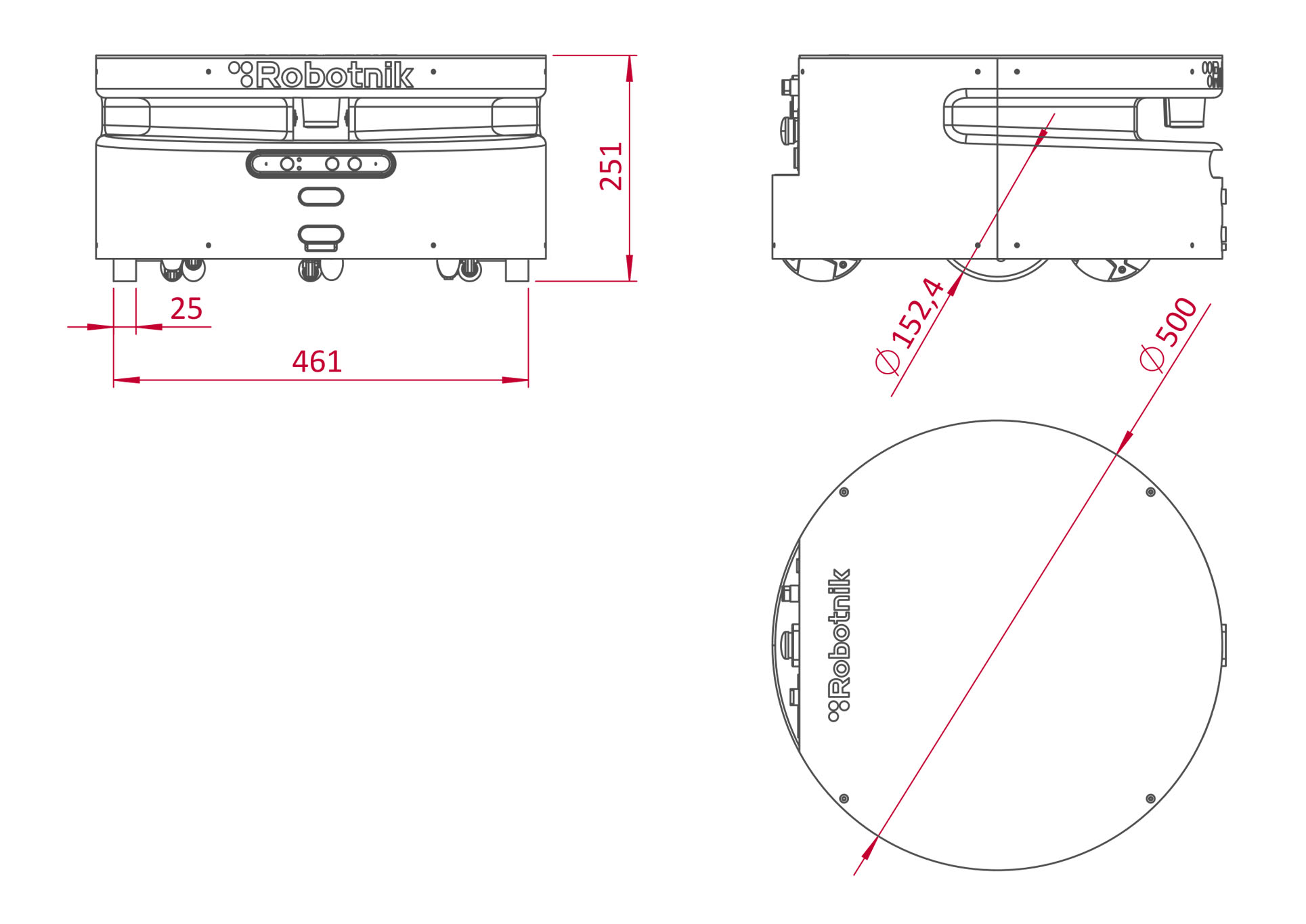
Size:
| Model Nº | RB-1 BASE |
| Ambient temperature / humidity | 0º to +50ºC |
| Size | ø 515 x 303-338 mm (with optional lifting unit) |
| Weight | 30 Kg |
| Speed | 1,5 m/s |
| IP | IP51 |
| Load capacity | 50 Kg |
| Controller | Industrial PC Intel i7, Open Architecture based on ROS |
| Traction system | Differential drive |
| Traction motors | 2 x 250 W servomotors |
| Autonomy | 6 h in industrial application |
| Max. climbing angle | 8% |
| Baterías | LiFePO4 30Ah@24VDC |
| Environment | Indoors |
| PC | 4th generation Intel 7 |
| RAM | 8 Gb |
| Hard drive | 120 Gb |
| Communication | WiFi 802.11ac, 4G |
| Connectivity | 2x USB, 2x Ethernet and 1x HDMI |
- Official ros-package:
- http://wiki.ros.org/Robots/RB-1_BASE
- Sources: https://github.com/RobotnikAutomation/rb1_base_sim
- Sources: https://github.com/RobotnikAutomation/rb1_base_common
- Supported versions: Melodic and Kinetic.










