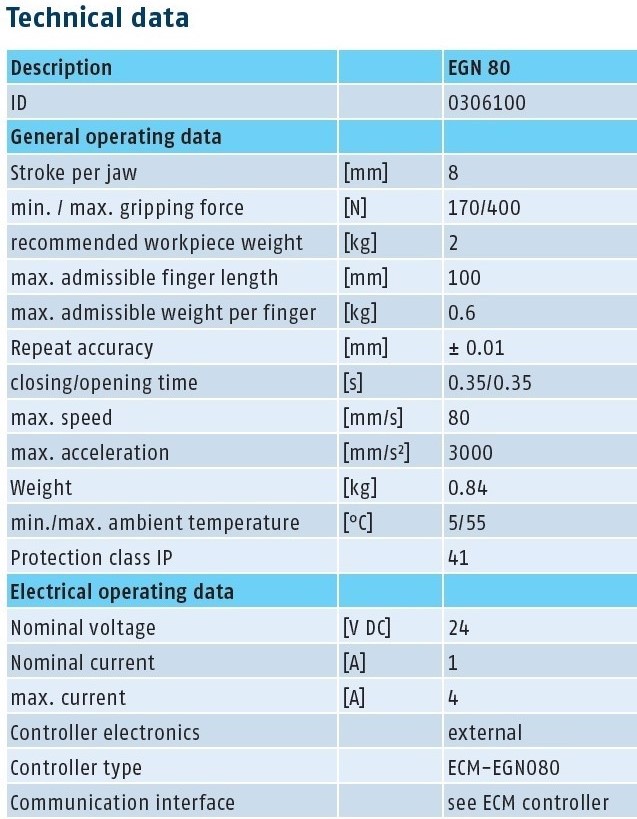
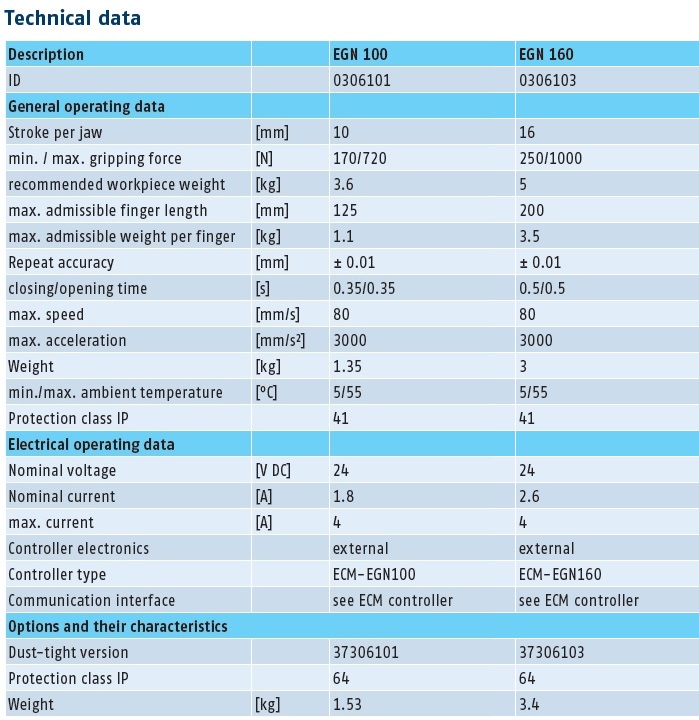
EGN
Robotic gripper
Fingers not included
The ROS drivers of this product aren't available yet, but it can be integrated with our robots very easily. Please consult us.
Optional components
Servo-electric 2-finger parallel gripper with high gripping force and moment loads due to the multi-tooth guidance
Field of application
Optimal standard solution for many areas of application; flexible use due to controllable gripping force, position, and speed
Advantages – Your benefits
- Drive design of servomotor for flexible use
- With external electronics for simple integration into existing servo-controlled concepts via Profibus-DP, or CAN bus
- Pre-positioning capability to reduce cycle times through a short working stroke
- Robust multi-tooth guidance for precise handling
- High maximum moments possible suitable for using long gripper fingers
- Mounting from two sides in three screw directions for universal and flexible gripper assembly
Control via external ECM controller
The electrical control of the gripper takes place via the separately available ECM controller. Connection of the controller to the higher level servo controlled concept can take place via Profibus or CAN bus. Both communication interfaces ensure simple integration into the higher level control system and enable the design of industrial bus topologies.